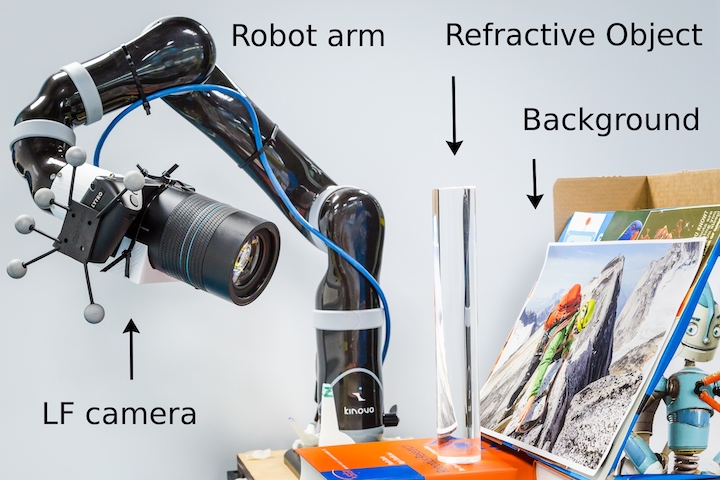
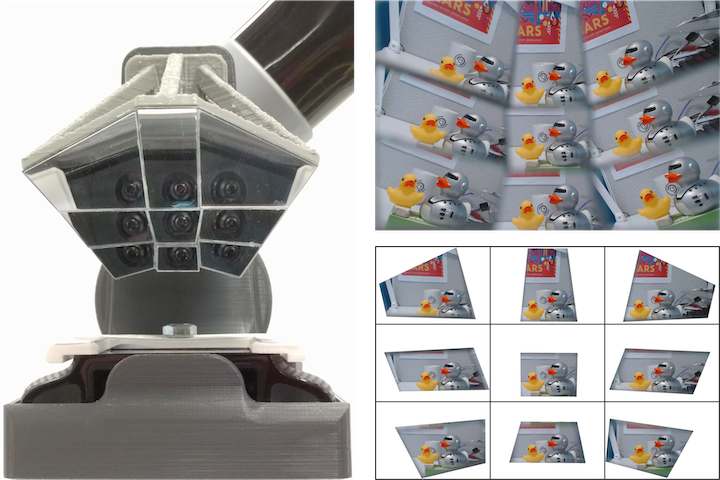
| D. Tsai, D. G. Dansereau, T. Peynot and P. Corke, “Refractive Light-Field Features for Curved Transparent Objects in Structure From Motion”, IEEE Robotics and Automation Letters (RA-L, IROS), October 2021. Available on IEEE and arXiv. |
 |
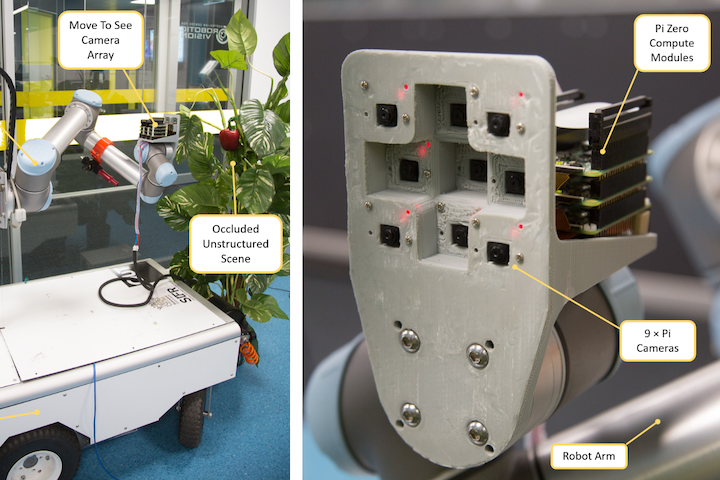
| C. Lehnert, D. Tsai, A. Eriksson, C. McCool, “3D Move to See: Multi-perspective visual servoing towards the next best view within unstructured and occluded environments”, IEEE International Conference on Intelligent Robots and Systems (IROS), November 2019. Available on IEEE and arXiv. |
 |
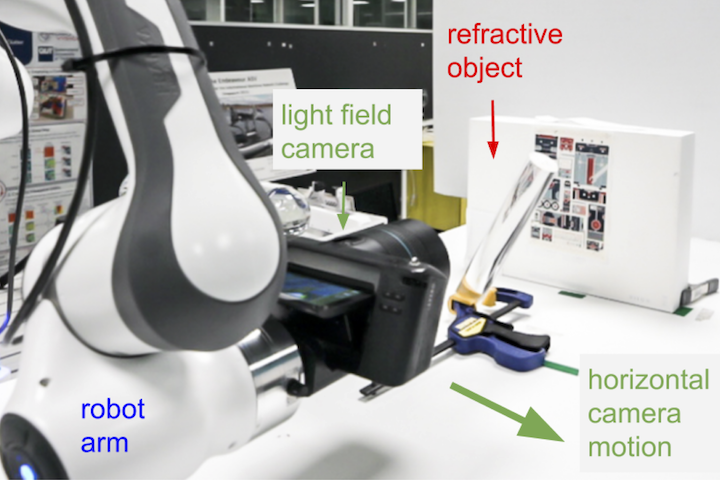
| D. Tsai, D. G. Dansereau, T. Peynot and P. Corke, “Distinguishing Refracted Features Using Light Field Cameras With Application to Structure From Motion”, IEEE Robotics and Automation Letters (RA-L, ICRA), April 2019. Available on IEEE and arXiv. |
 |
| D. Tsai, D. G. Dansereau, T. Peynot and P. Corke, “Image-Based Visual Servoing With Light Field Cameras”, IEEE Robotics and Automation Letters (RA-L), April 2017. Available on IEEE. |
 |
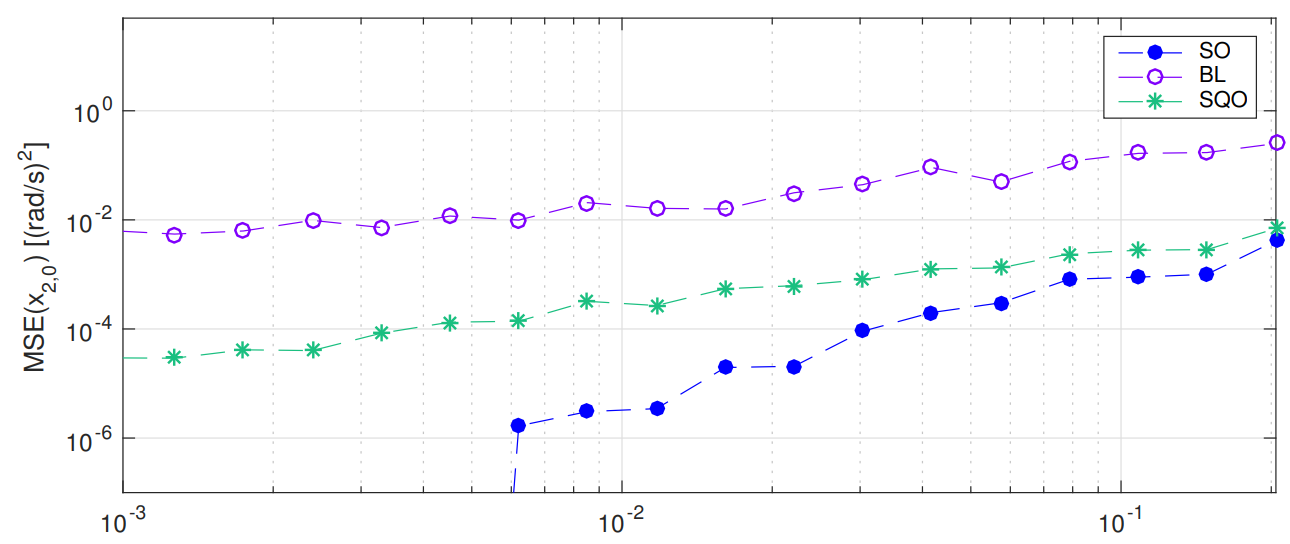
| T. L. Molloy, D. Tsai, J. J. Ford and T. Perez, “Discrete-time inverse optimal control with partial-state information: A soft-optimality approach with constrained state estimation”, IEEE International Conference on Decision and Control (CDC), December 2016. Available on IEEE and QUT ePrints. |
 |
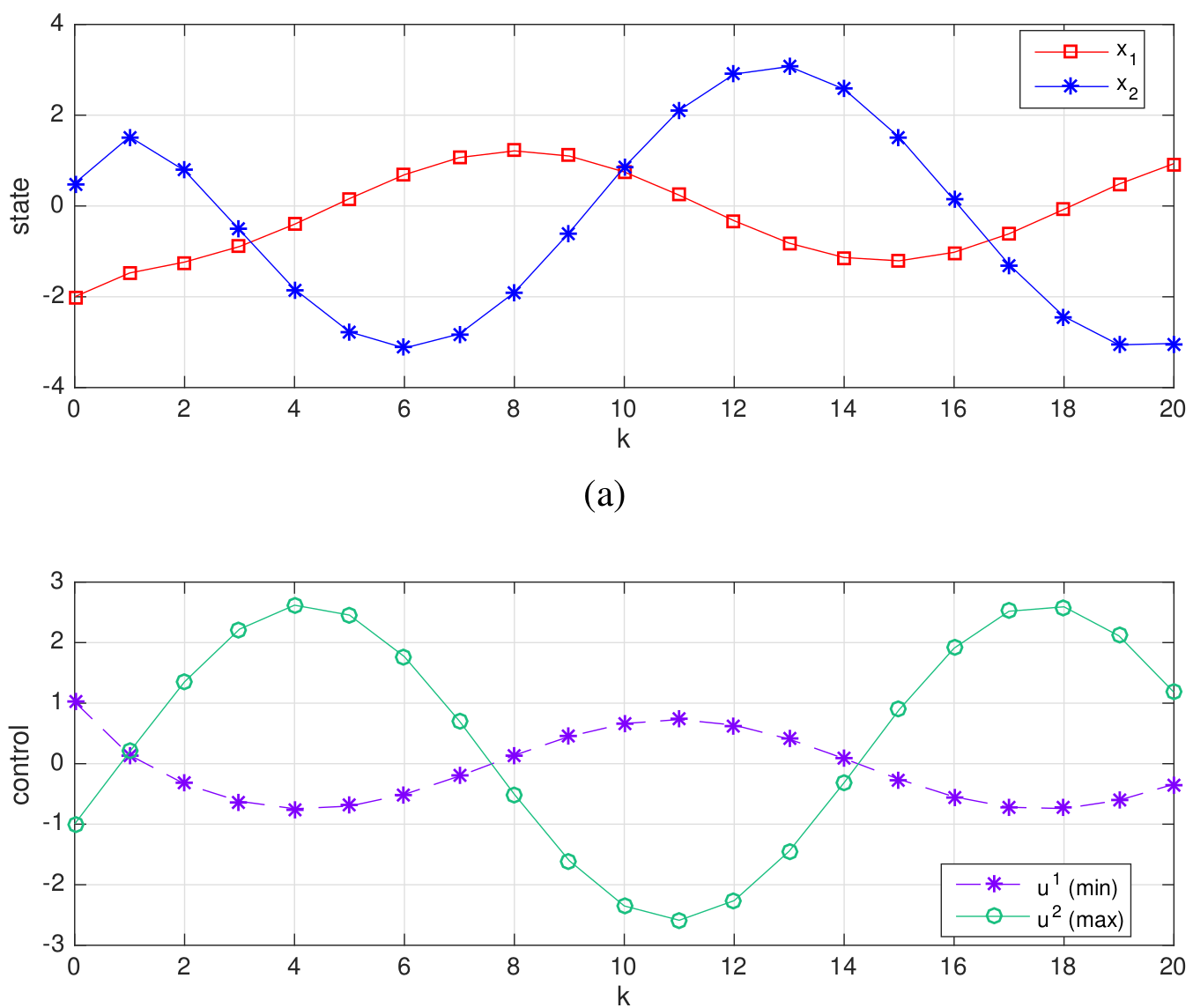
| T. L. Molloy, D. Tsai, J. J. Ford and T. Perez, “Inverse Two-Player Zero-Sum Dynamic Games”, Australian Control Conference (AuCC), November 2016. Available on IEEE. |
 |
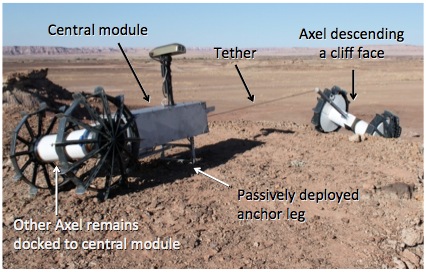
| D. Tsai, I. A. D. Nesnas, and D. Zarzhitsky, “Autonomous Vision-Based Tether-Assisted Rover Docking”, IEEE International Conference on Intelligent Robots and Systems (IROS), November 2013. Available on IEEE. |
 |
| J. A. Marshall and D. Tsai, “Brief paper periodic formations of multivehicle systems”, IET Control Theory & Applications, March 2011. Available on ResearchGate. |
 |